Optimal Path Planning for a UAV using GPOPS-II Jesus Tordesillas 0:36 5 years ago 1 362 Далее Скачать
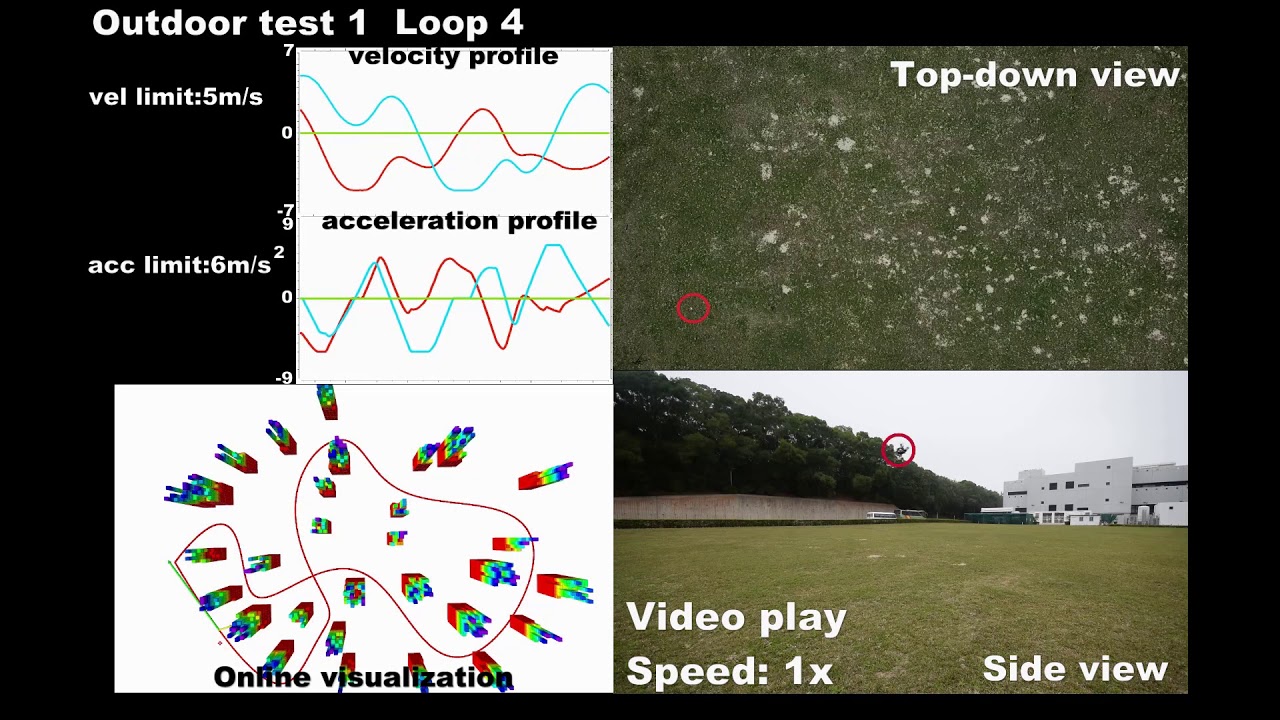
Optimal trajectory generation for quadrotor teach-and-repeat HKUST Aerial Robotics Group 2:59 5 years ago 699 Далее Скачать
Optimal Path Planning of UAV for Airborne Imaging of Outdoor Srtructures J Dimyadi @UoA 21:39 6 years ago 62 Далее Скачать
MIT ACL - Trajectory Optimization using GPOPS AerospaceControlsLab 0:21 14 years ago 1 415 Далее Скачать
Integrated UAV Trajectory Optimization and Potential Field Approach for Dynamic Collision Avoidance ARG-SnT-UL 0:25 1 year ago 561 Далее Скачать
Model Predictive Control with GPOPS-ii Smooth Path Planner Rayne Milner 2:36 3 years ago 283 Далее Скачать
Optimal time allocation for quadrotor trajectory generation HKUST Aerial Robotics Group 3:26 6 years ago 318 Далее Скачать
UAV Path Planning in Dynamic Environment with RRT* and OCTOMAP Arslan Ali 2:20 4 years ago 1 145 Далее Скачать
Real-Time Motion Planning with a Fixed-Wing UAV using an Agile Maneuver Space McGill AML 1:17 6 years ago 245 Далее Скачать
Path Planning Avoiding a Moving Obstacle with Optimization Solvers Zhilong Liu 0:04 7 years ago 95 Далее Скачать
Time-Optimal Planning for Quadrotor Waypoint Flight (Science Robotics 2021) UZH Robotics and Perception Group 2:26 3 years ago 61 254 Далее Скачать
Unmanned Aerial Vehicle Path Planning for Exploration Mapping Raccoon lab 1:11 4 years ago 2 038 Далее Скачать